News & Posts
Human Robot Interaction Research: A Visionary Guide to Behavioral Insights in 2026
40% of new robot deployments in 2026 now utilize Vision-Language-Action models, yet the human side of the equation often remains a black box of unquantified data. You likely recognize that subjective measures of trust are no longer sufficient and that synchronizing robotic telemetry with eye-tracking sensors is a persistent hurdle in your workflow. This guide empowers you to transcend these obstacles by mastering human robot interaction research through high-precision multimodal sensor fusion. We'll show you how to dissolve the silos between EEG, motion, and gaze to capture the invisible dynamics of human-machine teaming.
Establish a visionary research environment using Prophea.X and Dikablis Glasses to transform raw behavioral cues into actionable insights on cognitive load and social gaze, we'll examine the impact of the ISO 10218-1:2025 safety standards and provide a roadmap for reducing friction in collaborative environments. Prepare to evolve your methodology from simple observation to scalable multi-modal precision required for the next generation of human-technology interaction.
Key Takeaways
- Master the distinction between social and industrial environments to ground your research in the specific bidirectional communication needs of 2026.
- Transcend the limitations of single-sensor studies by integrating social gaze, pupil dilation, and postural shifts into a robust human robot interaction research methodology.
- Implement a framework for calibrated trust to move beyond subjective surveys and quantify the precise alignment between human expectations and machine performance.
- Architect a high-precision lab environment by synchronizing Dikablis Professional glasses with robotic telemetry via API for seamless, error-free data integration.
- Leverage Prophea.X as your central platform for multimodal data fusion, transforming complex physiological streams into a holistic understanding of the human-robot bond.
Defining the Frontiers of Human Robot Interaction Research
Harness the potential of a field where technology mirrors human intent. Human-robot interaction (HRI) is the multidisciplinary study of bidirectional communication between people and autonomous agents. In 2026, we’ve moved past the era of machines as mere mechanical tools. With the global robotics market reaching USD 38 billion this year, robots have evolved into collaborative partners that respond to our needs in real-time. This shift requires a new depth of human robot interaction research that prioritizes the internal state of the user. We must validate AI-driven models using objective behavioral data rather than relying on unreliable, subjective self-reporting.
Analyze the distinction between social and industrial HRI to understand the future of the field. Social HRI focuses on the nuanced cues of healthcare and service environments, where empathy and social awareness are paramount. Industrial HRI centers on the efficiency and safety of cobots within logistics and manufacturing. Both domains now demand high-precision quantification of the human experience. As Vision-Language-Action (VLA) models are now used in 40% of new robot deployments, the complexity of these interactions necessitates a rigorous, data-driven approach to ensure seamless integration into human workflows.
The Evolution of Cognitive and Physical HRI
Prioritize the human element by understanding the dual nature of safety. While physical HRI focuses on biomechanical force limits and collision avoidance, cognitive safety ensures that a robot’s actions are predictable and transparent. The update to ISO 10218-1:2025 has codified the requirements for physical proximity, but the next frontier lies in human-centered design that democratizes these complex systems for non-experts. Human robot interaction research helps bridge this gap by identifying the behavioral markers of user confidence. Cognitive HRI is the study of mental models formed during interaction.
HRI Research Domains in 2026
Observe how these dynamics manifest across diverse sectors. In the automotive industry, researchers focus on the critical seconds of driver-to-vehicle handovers, where trust calibration determines safety. Healthcare remains a dominant sector with a 28.0% market share, utilizing social robots for geriatric care and adolescent mental health support. Meanwhile, industrial environments have been transformed by bipedal service robots and cobots that manage warehouse logistics alongside human teams. These applications demand high-precision tools to quantify how humans actually feel and behave when paired with increasingly autonomous systems. This multifaceted approach ensures that as robots expand their influence, they remain aligned with human needs and safety standards.
The Multimodal Architecture of HRI Studies
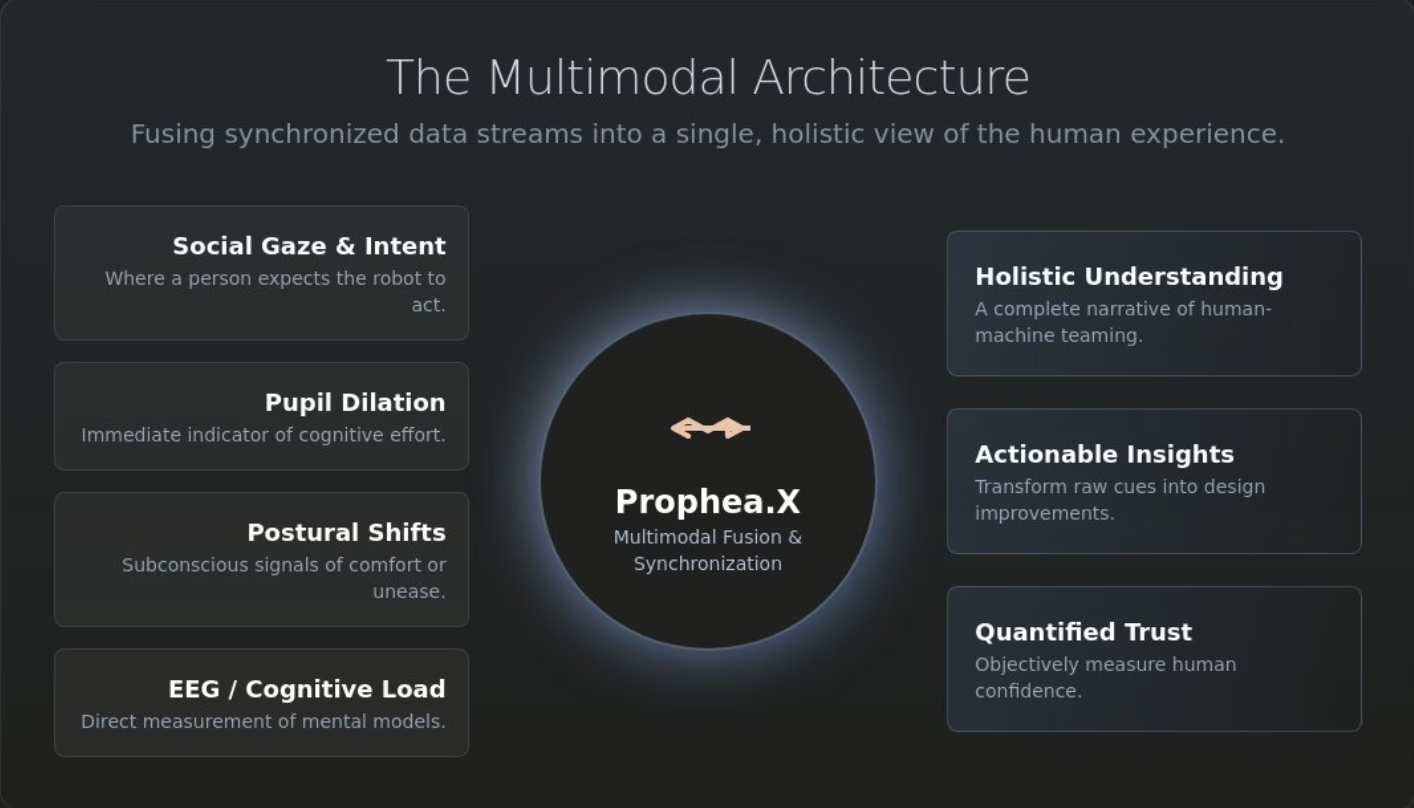
Transcend the limitations of isolated data points by embracing a holistic view of the human experience. While traditional video observation captures the surface of an interaction, it fails to reveal the cognitive friction and subconscious responses that define successful collaboration. In 2026, human robot interaction research has moved toward a multimodal architecture that treats synchronization as the gold standard. By fusing social gaze, pupil dilation, cognitive load, and postural shifts into a single timeline, you create a high-fidelity map of the user’s internal state. This level of Mastering Custom Eye Tracking Integration is essential for moving beyond observation into true behavioral quantification.
Consider how leading research from Carnegie Mellon emphasizes the complexity of social agents and robotic caregivers. These studies demonstrate that trust is a fluctuating response to robotic predictability rather than a static value. To capture these dynamics, your lab must achieve sub-millisecond synchronization between the robot’s telemetry and the human’s physiological reactions. When you bridge the gap between machine logs and biological physics, you transform raw data into a narrative of human-machine teaming. Pupil dilation, for instance, provides an immediate indicator of cognitive effort, while subtle postural shifts can signal a loss of comfort before the user is even consciously aware of it.
Social Gaze and Intent Prediction
Measure where the human expects the machine to move by analyzing social gaze patterns. Eye-tracking data provides a direct window into intent prediction, allowing you to see if a participant anticipates a robot’s trajectory or is surprised by its velocity. This is the foundation of joint attention; the ability for humans and robots to focus on the same task-relevant objects simultaneously. Utilizing professional eye tracking glasses in mobile HRI environments ensures that your data remains precise even as participants move freely through a smart factory or healthcare ward. These insights allow you to design interaction models that feel natural and intuitive rather than mechanical.
Physiological Markers of Trust and Stress
Examine the biological signatures of trust to move beyond subjective surveys. Integrate EEG to quantify cognitive load during complex handovers, identifying exactly when a task becomes mentally taxing for the user. Muscle tension, measured via EMG, acts as a vital proxy for anxiety when robots operate in close proximity to human coworkers. Additionally, heartbeat variability (HRV) offers a window into the emotional response to autonomous agents, revealing the physiological cost of interaction. If you’re ready to architect a lab that bridges these data silos, consult with our experts on multimodal integration to begin your next phase of discovery.

© Ergoneers
Overcoming the Trust Gap: Quantifying Human Response
Dismantle the assumption that trust is an unmeasurable, subjective sentiment. In the sophisticated landscape of 2026, human robot interaction research treats trust as a dynamic state that can be precisely calibrated through behavioral data. We define “Calibrated Trust” as the geometric alignment between a human’s expectation and a robot’s actual capability. When these two spheres overlap, collaboration flourishes; when they diverge, system rejection is inevitable. By quantifying these invisible dynamics, you move beyond the “trust gap” and toward an era of empowered human-machine teaming.
Navigate the complexities of the Uncanny Valley with clinical precision. With twelve commercial humanoid platforms now available for purchase or lease, the risk of design rejection has never been higher. Behavioral research provides the vital shield against this friction. We’ve observed that transparency in robot intent, often delivered through augmented reality (AR) overlays or intuitive light signals, fundamentally alters human gaze patterns. When a robot effectively communicates its next move, the human observer’s cognitive load drops, and their visual attention stabilizes, signaling a transition from cautious monitoring to active partnership.
Identifying UX Friction in Robot Interfaces
Apply usability testing eye tracking to your robot controllers and HMI panels to expose hidden points of confusion. By analyzing participant scan paths, you can determine if operators are missing critical status indicators or if their attention is fragmented by poorly designed interfaces. This data ensures that the command center of your HRI system is as intuitive as the robot itself. Trust is built when a robot behaves according to the user’s visual expectations. If the interface fails to support these expectations, the bond of collaboration breaks before the task even begins.
Measuring Social Acceptance of Autonomous Agents
Explore the nuanced variables that dictate social acceptance in public and private spheres. Research indicates that robot personality and perceived gender significantly influence how humans accept autonomous agents into their personal space. Utilize structured behavioral coding schemes to categorize non-verbal human responses, such as micro-expressions or defensive postural shifts. Consider how social robots in public spaces, such as museums, must navigate complex crowds without violating social norms. Success in these environments is not just about collision avoidance; it’s about mastering the subtle dance of social cues that human robot interaction research is uniquely equipped to decode. This rigorous approach transforms social acceptance from a design goal into a verifiable metric.

© unsplash
Methodological Frameworks for High-Precision HRI Analysis
Adopt a structured, five-phase methodology to transform complex behavioral cues into a blueprint for interaction design. High-precision human robot interaction research demands more than high-end hardware; it requires a rigorous framework that links raw sensor data to specific performance outcomes. By following a logical progression from scenario definition to iterative refinement, you ensure that every millisecond of data contributes to the evolution of human-machine teaming. This systematic approach allows you to move from broad hypothesis to the clinical precision required for the next generation of autonomous systems.
- Phase 1: Definition. Outline the interaction scenario and identify key KPIs, such as time-to-trust or cognitive load thresholds.
- Phase 2: Integration. Configure the lab environment by integrating Dikablis eyetracking glasses with robot telemetry using ROSII and Prophea.X high-speed API.
- Phase 3: Acquisition. Execute the study while ensuring millisecond-precise synchronization across all sensors.
- Phase 4: Synthesis. Utilize Propheaeye to visualize gaze patterns, heatmaps, and physiological data within the context of the robot’s state.
- Phase 5: Optimization. Apply these insights to refine robot behavior and HMI, creating a more intuitive and safe user experience.
Synchronized Data Acquisition for Multi-Sensor Studies
Eliminate the risk of temporal drift by establishing a unified clock for robot logs and eye-tracking data. In complex HRI scenarios, even a slight misalignment between a robot’s unexpected movement and a human’s physiological response can lead to false conclusions. Utilize Prophea.X to manage these intricate data streams in real-time, providing a cohesive narrative of the interaction. This precision is particularly vital when applying eye tracking for skills assessment research to quantify the proficiency of robot operators. If you’re ready to implement this level of precision in your own facility, contact our consulting team for lab integration support.
Designing the Human Performance Lab
Optimize your lab layout to capture both the physical and social dimensions of HRI. A visionary research space must balance the clinical requirements of hardware synchronization with the need for ecological validity. When choosing between mobile Dikablis glasses and stationary remote trackers, consider the degree of mobility your scenario requires. Mobile trackers excel in dynamic warehouse logistics, while remote systems provide unobtrusive data for seated HMI testing. Ensure the environment minimizes the “observer effect” to capture genuine human behavior, allowing the technology to fade into the background as the research takes center stage. This careful arrangement fosters the quiet confidence needed for high-stakes human robot interaction research.
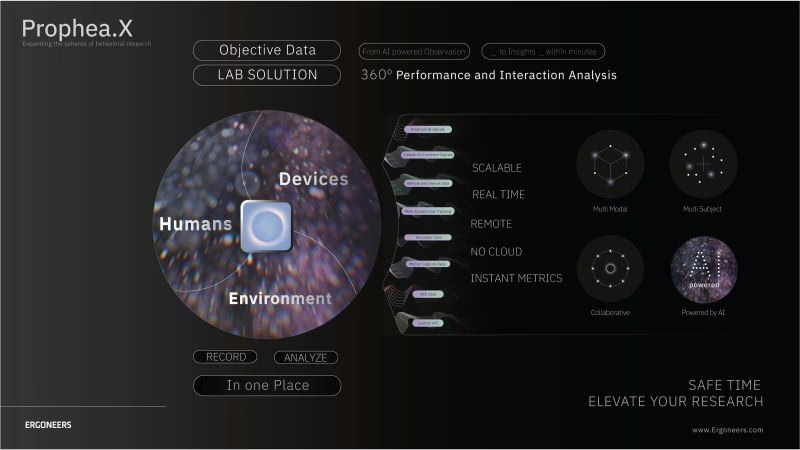
Propelling HRI Forward with Ergoneers Prophea.X
Elevate your methodology from fragmented observations to a unified field of human-centric insight. Prophea.X serves as the ultimate engine for multimodal data fusion, allowing you to synthesize disparate streams into a singular, coherent narrative of human behavior. When paired with Dikablis Professional glasses, the software offers a seamless bridge between mobile eye tracking and robotic telemetry. This integration ensures that your human robot interaction research is grounded in error-free precision; it moves your lab beyond simple data collection toward true human-centric innovation. By centralizing your workflow within this advanced ecosystem, you gain the agility needed to lead the next technological revolution.
Collaborate with our specialists through Behavioral Research Lab Consulting to architect a facility that meets the rigorous demands of modern science. We don’t just provide hardware; we act as a vital partner in your evolution. Our legacy of excellence in eye tracking integration provides the foundation for your success, whether you’re operating in a theoretical academic context or a practical industrial training environment. By combining our high-end research tools with your domain expertise, we expand the boundaries of scientific knowledge together.
The Prophea.X Advantage in HRI
Automate the complex task of gaze mapping on dynamic robotic systems with clinical efficiency. Prophea.X allows you to visualize cognitive load metrics in real-time alongside robot performance data, providing immediate feedback on the quality of the interaction. Prophea.X acts as the central intelligence for modern behavioral labs, orchestrating the flow of information between sensors and analysts. This capability is essential for identifying the precise moment when a user’s mental model aligns or conflicts with the robot’s trajectory, allowing for the rapid optimization of HMI protocols.
Next Steps for HRI Visionaries
Scale your efforts from initial pilot studies to comprehensive industrial testing with the support of our dedicated resource centers. We invite you to participate in our Training and Workshops to master the nuances of the Ergoneers ecosystem and ensure your team is equipped for high-precision analysis. This journey from inspiration to implementation requires a partner committed to your long-term legacy and the prioritization of the human element. Empower your HRI research with Prophea.X and take the lead in the evolution of human-machine teaming.
Architecting the Next Era of Human-Machine Teaming
Lead the evolution of technology by grounding your methodology in the clinical precision of multimodal data. You’ve explored how to dissolve data silos and quantify the invisible dynamics of calibrated trust through a structured five-phase framework. This shift from robots as tools to robots as partners requires a visionary approach to human robot interaction research, where every physiological cue informs the design of safer, more intuitive systems. Prophea.X stands as the only unified platform capable of fusing these complex behavioral streams into a holistic map of human intent.
Trust in a legacy rooted in academic rigor and industrial excellence. As a spin-off from the Technical University of Munich (TUM), we remain a vital partner for global leaders in automotive and aerospace R&D. Our commitment to prioritizing the human element ensures that your discoveries translate into meaningful progress for both industry and academia. Explore the Future of HRI Research with Prophea.X and transform your laboratory into a center for human-centric innovation. The next phase of behavioral discovery is within your reach; we look forward to helping you define it.
Frequently Asked Questions
The primary goal is to optimize the bidirectional communication and collaboration between humans and autonomous agents. This field focuses on enhancing safety, efficiency, and social acceptance by aligning robotic behavior with human psychological and physical needs. By studying these dynamics, researchers create a blueprint for more intuitive and predictable human-machine teaming across various sectors.
Eye-tracking provides a direct window into a user’s spatial expectations by revealing exactly where they look before and during an interaction. If a participant’s gaze precedes a robot’s movement, it indicates successful intent prediction; conversely, sudden saccades suggest surprise or confusion. This data allows developers to refine robotic trajectories so they match human visual anticipation, reducing cognitive friction.
High-precision studies integrate a diverse array of sensors to capture a holistic view of human behavior. Common hardware includes Dikablis Professional glasses for gaze tracking, EEG for cognitive load monitoring, and EMG for detecting muscle tension. These biological streams are fused with robotic telemetry and motion capture data within a unified platform like Prophea.X to ensure millisecond-precise synchronization.
Objective trust measurement involves analyzing physiological markers that correlate with confidence and stress levels. Researchers utilize heartbeat variability (HRV), pupil dilation, and scan path stability to quantify a user’s internal state in real-time. This human robot interaction research methodology moves beyond subjective surveys by providing a verifiable metric of “calibrated trust” based on biological physics.
Social HRI focuses on robots designed for healthcare, education, and service roles where empathy and social cues are vital for success. Industrial HRI centers on collaborative robots, or cobots, within manufacturing and logistics environments where efficiency and physical safety are the primary KPIs. While the environments differ, both domains rely on precise behavioral data to ensure seamless integration into human workflows.
Achieving sub-millisecond synchronization requires linking eye-tracking hardware with the robot’s control system via a high-speed API and a unified system clock. Software like Prophea.X acts as the central intelligence, timestamping every gaze point and robotic movement simultaneously. This error-free precision is essential for identifying the exact cause-and-effect relationships between a machine’s actions and a human’s behavioral response.
Ethical human robot interaction research prioritizes data privacy, informed consent, and the psychological impact of anthropomorphism. Researchers must ensure that physiological data is handled with clinical confidentiality, especially as robots move into public spaces like museums or geriatric care facilities. Maintaining a human-centric focus ensures that technology empowers the user without infringing on their autonomy or emotional well-being.
High-precision eye-tracking identifies the exact points of UX friction within a robot’s interface or command panel. It reveals if an operator is missing critical status indicators or if their attention is fragmented by a poorly designed HMI. By capturing these subtle visual cues, researchers can implement iterative design changes that improve system transparency and reduce the risk of operator error in high-stakes environments.